
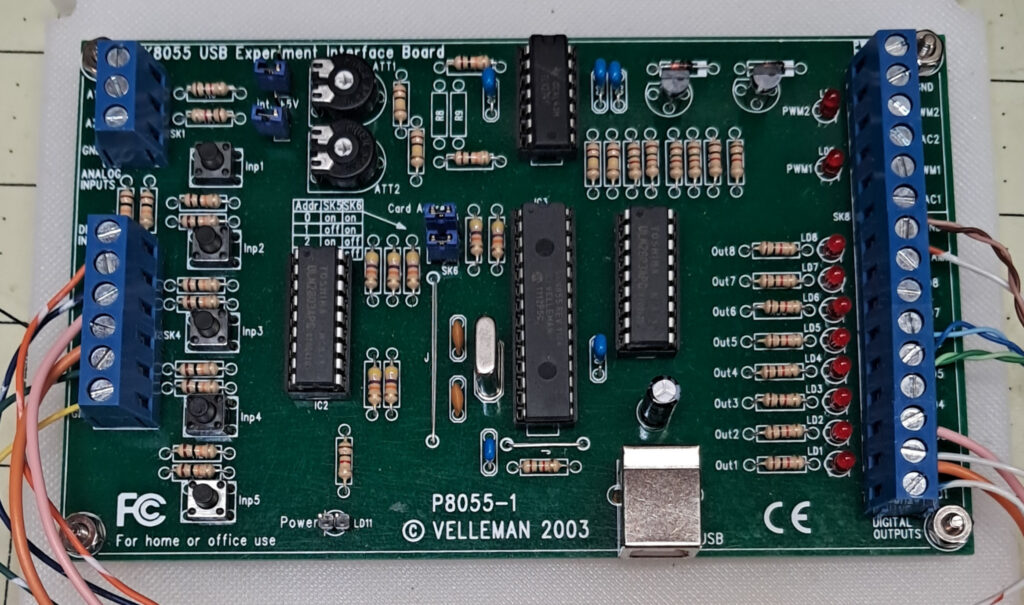
The USB controller used on my previous Exploradome observatory was the venerable Velleman K8055, and was controlled by Lesvedome software. I would like to continue to use it as the controller for my new dome’s drive, but I’ll need to come up with a new software driver for it.
Back when I used the Exploradome, all my computers ran Windows XP, 7 or 10 later on. On the job I was a Microsoft Certified System Engineer, as well as a Microsoft Certified Trainer, so I was very familiar with Windows. However, when Windows 11 came along and tried to force me to buy all new Microsoft-approved hardware, I drew a line in the sand. Now all my “old” laptops and workstations run on Linux, Linux Mint specifically, and I love it. I’m never going back.
Since Lesvedome is a Windows only program, I’ll need to replace it. I hope to come up with a working INDI drive for the K8055, but if not, I’ll substitute something that does have an INDI driver. I’ll cross that bridge when I get there, right now I need to get on with building the hardware.
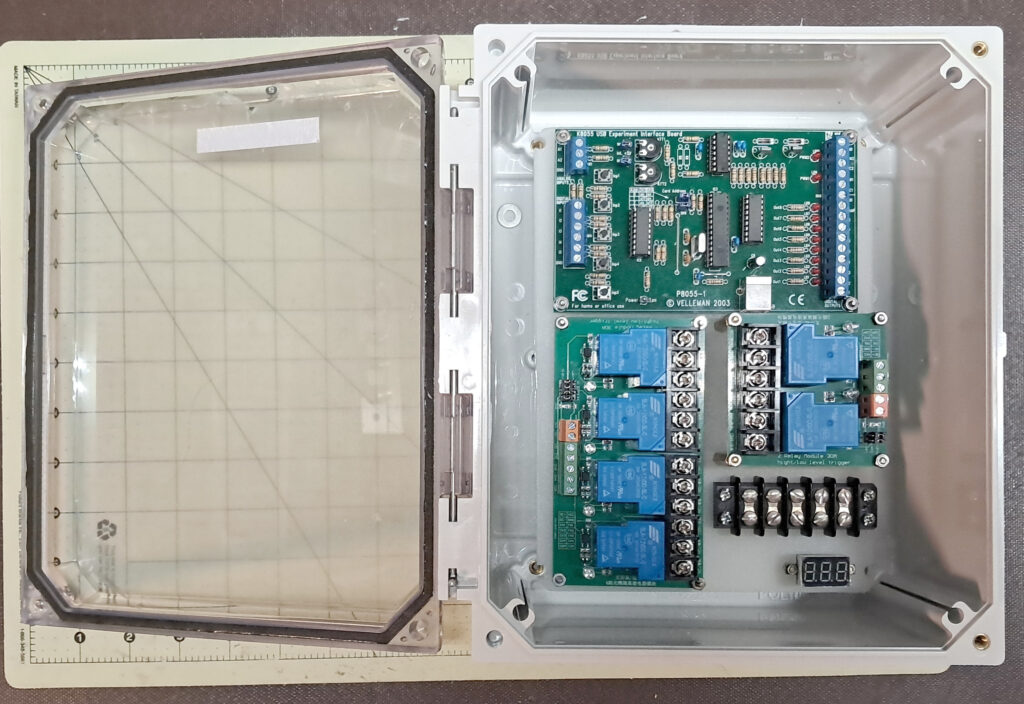
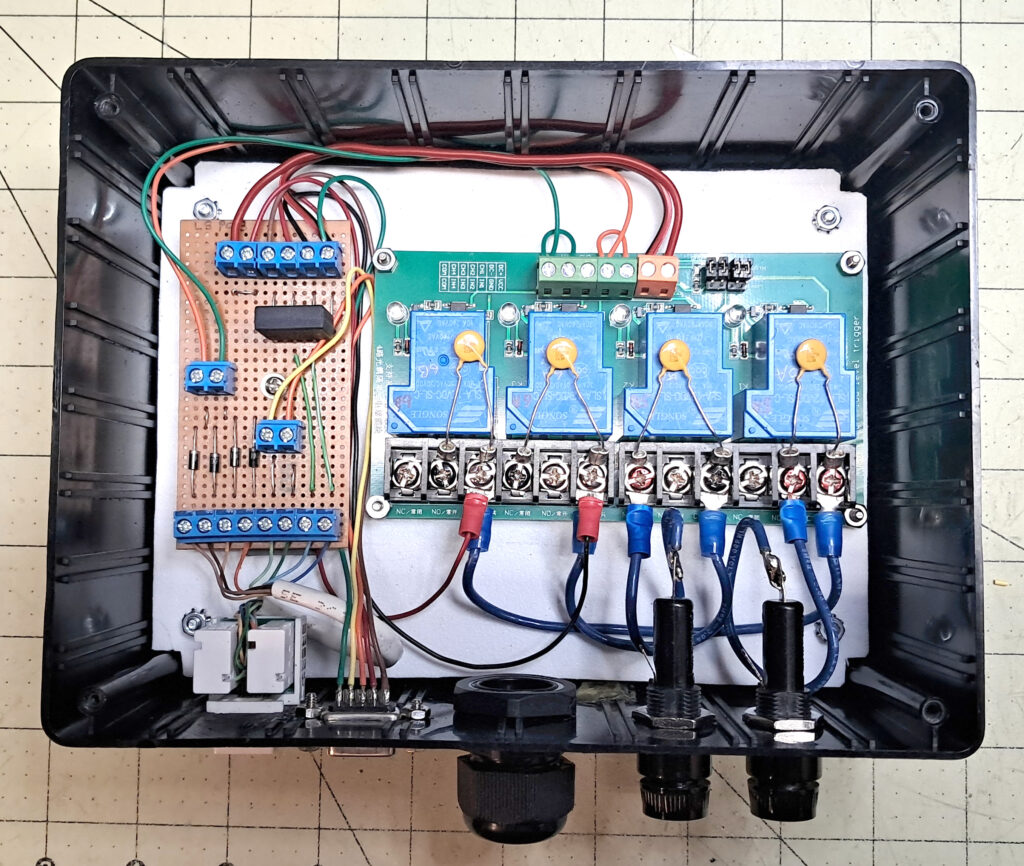
All the motor controller electronics are being built into a watertight housing, except for two relays that control the shutter motor and lower door actuators, which need to be mounted up in the rotating dome. There will be a set of contacts at a fixed location to transfer power from the lower controller to the upper, plus a couple of inductive links to pass shutter/door open and closed feedback signals back down to the USB controller card.
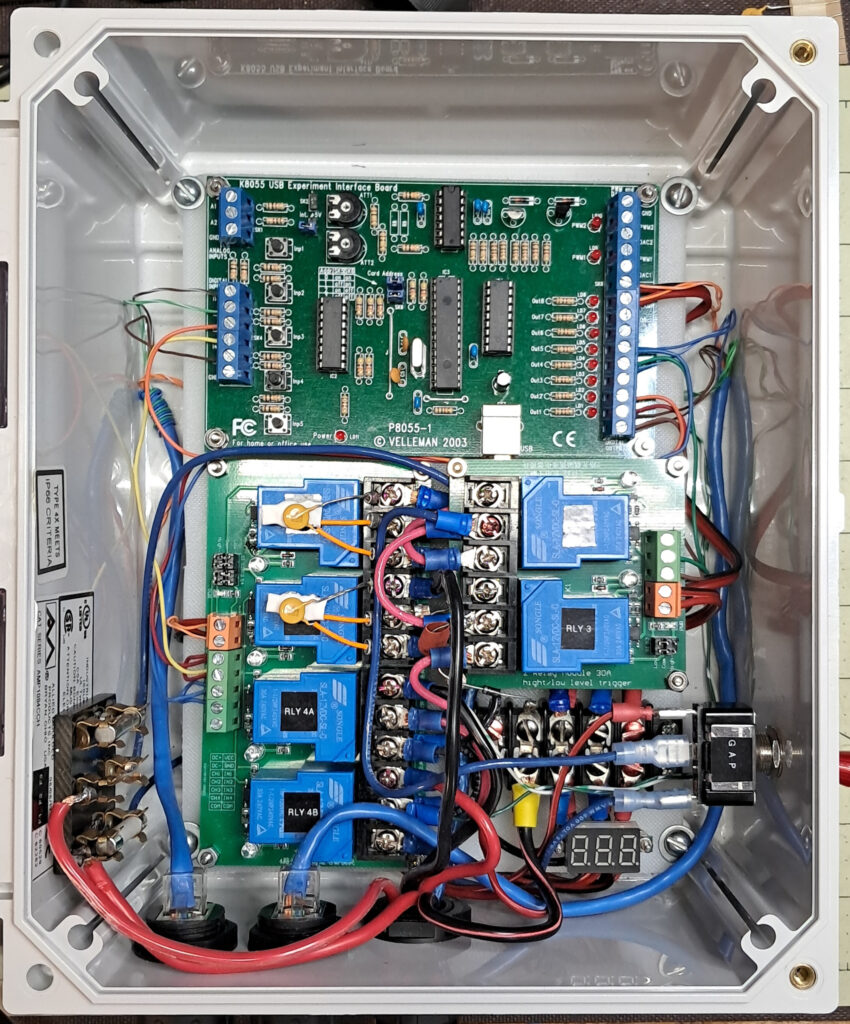
To fit everything within the box, and still have access to the USB socket on the bottom edge of the Velleman card, the double relay module was mounted on standoffs so the USB cable can slip under it and plug into the USB socket. The old Exploradome controller was built like a prototype, so I decided to create a more professional-looking build this time, and also simplify the original design by using relay modules that are readily available online nowadays. It was necessary to update my original Lesvedome schematic somewhat to adapt it to the modules, but the end result is the same, and much neater than my prototype ever was.
One issue worth mentioning when using these relay modules is it appears no one makes a 30-Amp double pole double throw (DPDT) relay module. Instead, I used two single pole double throw (SPDT) modules with their input signal lines paralleled to emulate a DPDT relay. The six relays shown in the photo are set up to provide two SPDT and two DPDT relays.

A hand controller is also included in the design for easy manual control. There are four control switches, two for the dome’s azimuth motor, and two for opening and closing the shutter/lower door. The four red LEDs next to the switches provide visual feedback, even when the dome is under software control. The handset interfaces to the main controller through an RJ-45 feed-through jack on the bottom of the housing.
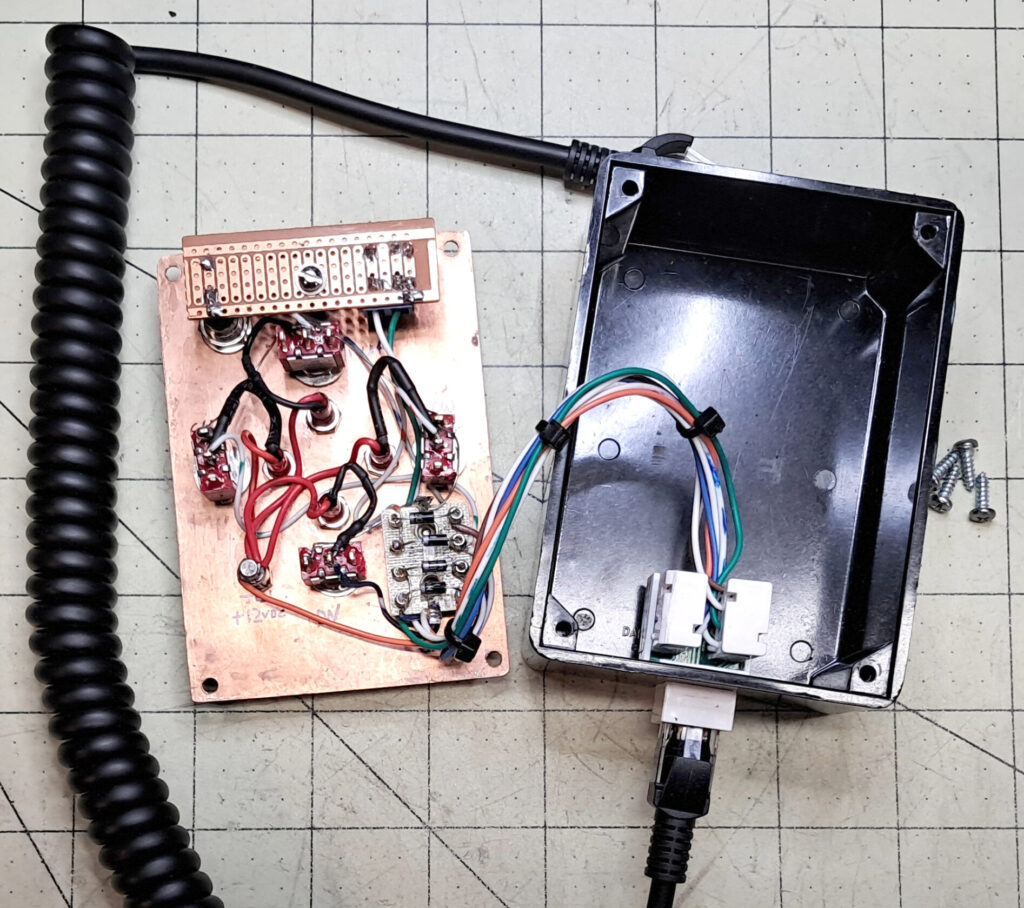
Inside the hand controller the circuit is fairly simple. Besides the four control switches and associated LEDs, there is another front panel mounted bi-color red/green LED on a small PCB. This LED indicates whether the dome is in an open or close cycle – red for open and green for close. There are also four logic diodes going to the switches, mounted on another small terminal board.
The upper dome control box contains only two DPDT relays, plus the components for the diode logic, and for providing +12VDC to power the four-relay module. As with the main controller, I used two pairs of SPDT relays, with their control signals paralleled, to emulate the DPDT relays.
I added two control signals that were not on the original Lesvedome schematic. One signal indicates the completion of the Open shutter cycle, while the other indicates the end of the Close cycle. These two signals are coming from limit switches, so they are physically generated by movement of the shutter and lower door. They are not just a software timeout function like in Lesvedome, although adding a timeout as another layer of protection is also a good idea.
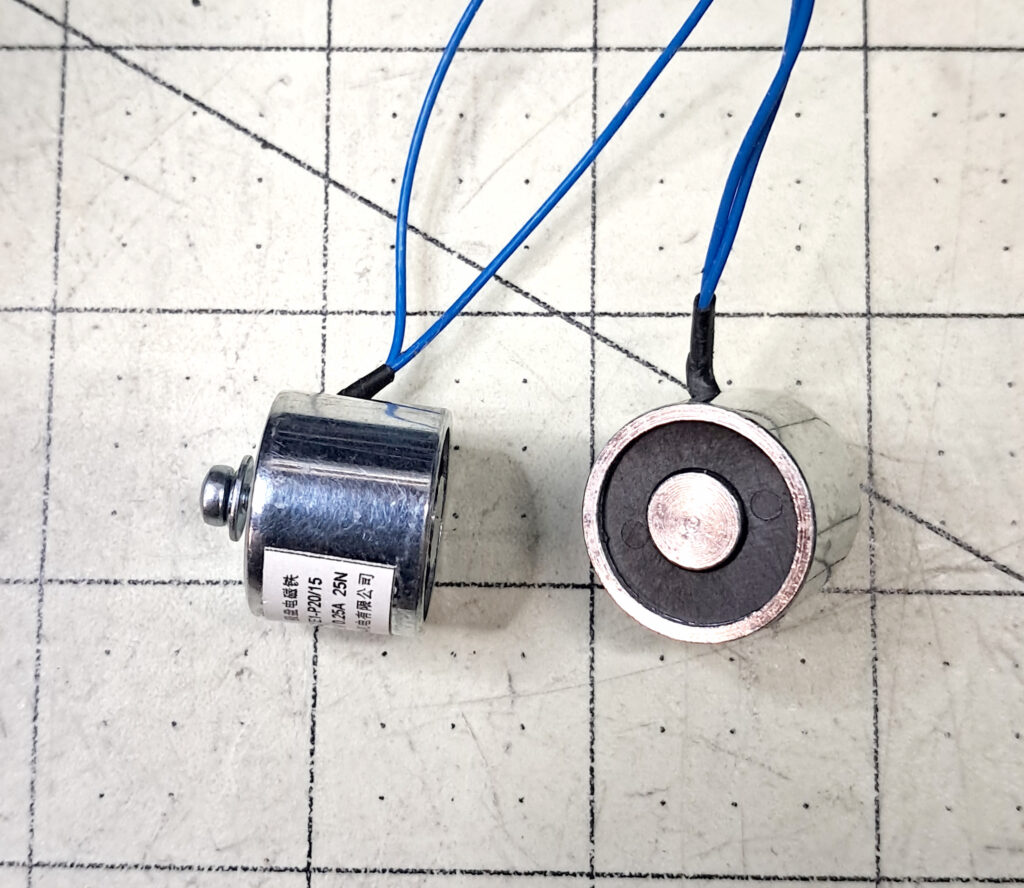
The open/close cycles only run while at the Dome’s Park position, and each of the two feedback signals activates a corresponding fixed electromagnet in the upper dome that’s lined up over a matching hall sensor connected to the main controller in the lower dome.
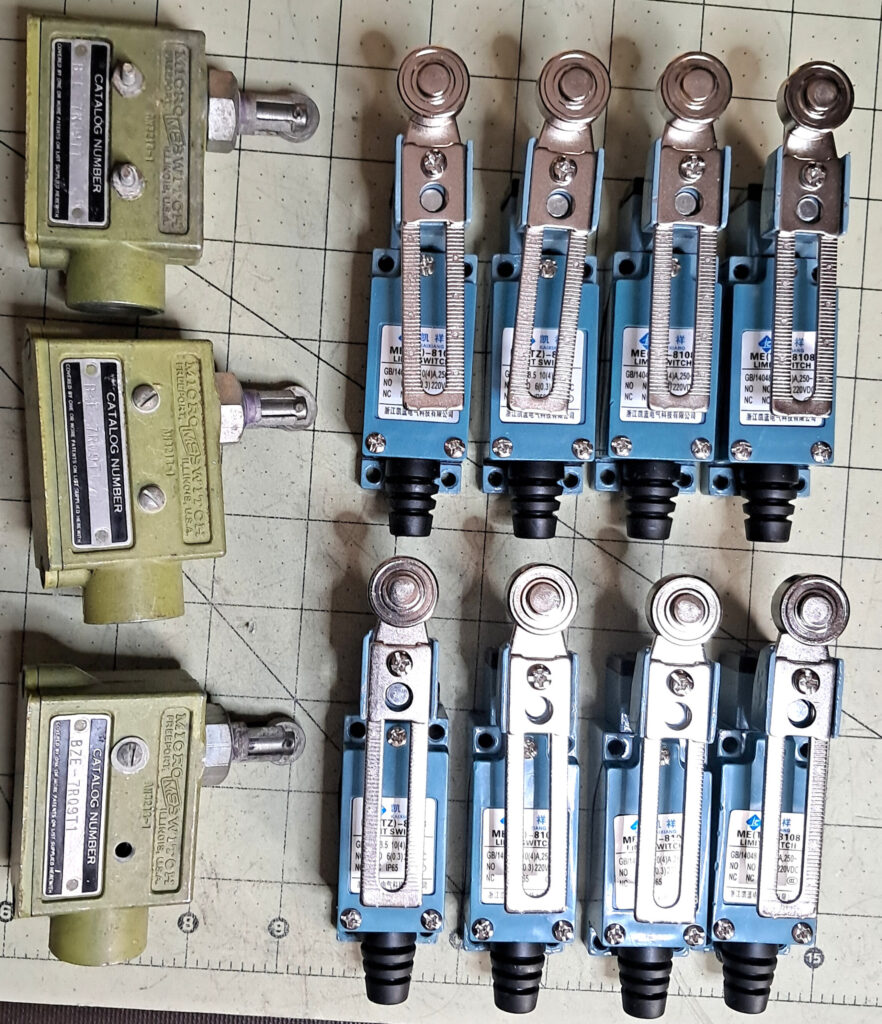
These are the types of limit switches I’m using. I prefer the lever arm switches, but I have plunger switches, too, if needed. There will be one switch at the top and bottom of both the shutter and the drop-down door for controlling the open/close cycles, that are tied into the diode logic to the relay module inputs.
I’m also addressing a few safety concerns as I go. For example, if a limit switch were to fail, there is a real possibility of damaging the dome or even injuring someone because the motors provide a good bit of torque, so I’m also incorporating additional emergency shutoff switches into the shutter controller. These will be an independent set of switches top and bottom for both shutter and door, positioned to cut power to the motors in case of a limit switch failing and the motor trying to drive the shutter or door into a hard stop. These switches will tie into the +12VDC power line to the associated relay module, cutting the power to the module if activated. All-in-all the controller will use a total of eight limit switches.
The switches were listed as part number ME(TZ)-8108, and are, like most things these days, made in China. I found listings online for three versions. The cheapest is listed as having a plastic roller and iron/copper contacts. The second has a metal roller and iron/silver contacts. And the third, which is the most expensive, is listed as having the metal roller plus copper/silver contacts. All the listings I found for this third version were out of stock, so I got the second tier, which was a buck or so more than the first. It’s easy to tell the difference in the rollers, but I’m not sure how to tell if the contacts are really as stated.
Each switch has one set of normally open (NO) contacts and one set of normally closed (NC), with no common between them. To make an SPDT switch, which is what I need, a jumper is added from one NC contact to one NO contact. This jumper obviously becomes the common.
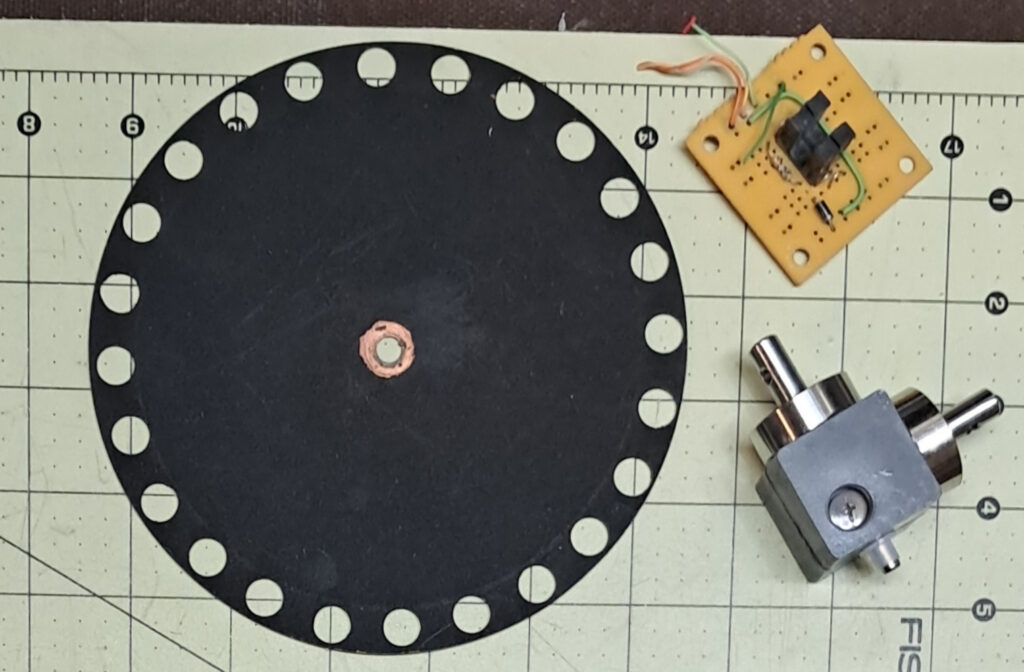
To complete the azimuth drive I need a gray coder for tracking the dome position. I pulled a couple of parts from the old Exploradome coder, and also purchased a small right-angle gearbox to use with the new motor. I need to turn a couple of shaft adapters on my mini lathe to adapt the gearbox shafts to the gray-coder disc and motor, and then make mounts for it and the photo sensors. Another option I’m considering is an encoder, which would be a little more elegant solution if I can find a proper one.
I’ll also need a home sensor which will likely mount to the same assembly. But instead of using a magnetic switch, as I did on the old controller, I plan to use a photo-reflective sensor this time.
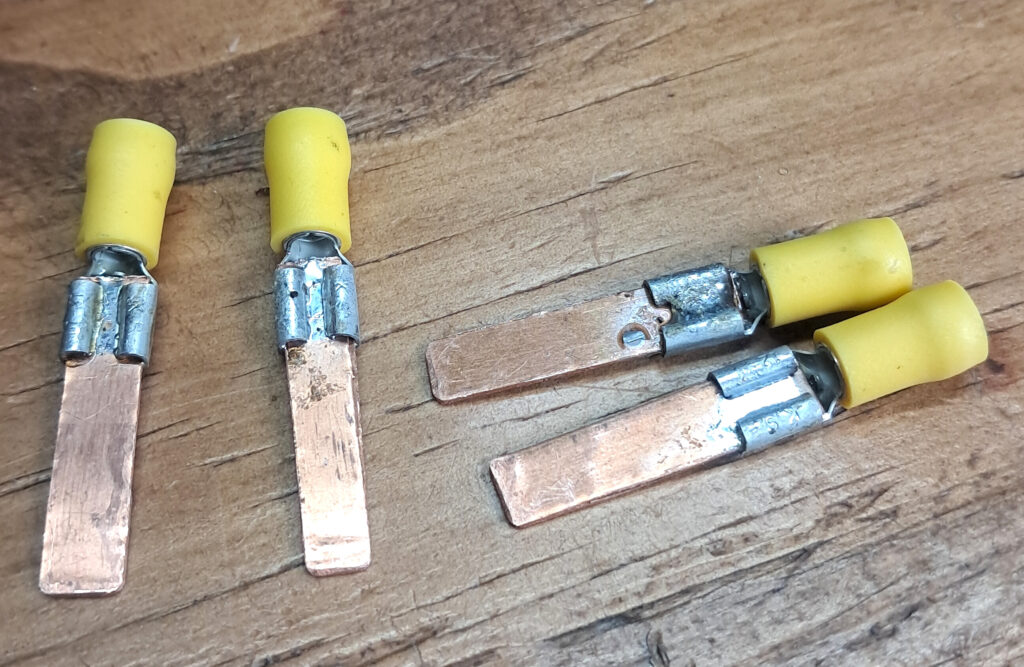
The 12VDC power supply running the controller and motors is a model ESP115 from an old HP Compaq server. It can provide a max of 30-amps which should be plenty for the observatory. I also have a spare unit for redundancy. The only issue with it is the output connector. The power supply original slid into a mating connector on a backplane, but I don’t have this connector and couldn’t find anything compatible online, so I made a set of blade contacts that will plug into it.
Page last updated 07/06/2026